【特許を取得しました】
|
●
2018年12月14日 日本の特許を取得しました。
【特許番号】特許第6448169号
今後 世界のほぼ全ての国の特許を取得していきます。
|
【RT2】は、「外部からのエネルギーの補充を必要としない回転技術」です。
この度、この回転技術に関して、日本の特許庁より 特許を認めて頂くことができました。
回転技術は発電にとって、とても重要な技術です。火力発電、原子力発電、水力発電、風力発電、
いずれも、タービン(モーター)を回転させることで発電しています。
効率良く電気を起こすことは とても重要です。
そのため、世界中が
いかに少ない労力(少ないコスト)で発電できないか研究にしのぎを削っています。
そして日々 世界のどこかで、「新しい技術ができた」と発表され、特許が出願されていますが、
実際には回転しないもの、あるいは、発電できないもの、なども特許出願されていますが、
いずれも、特許として登録されていません。
回転の理論、あるいは発電の理論が、不十分、もしくは間違っているからです。
しかし、回転技術【RT2】は、その理論が特許という形で認められました。
今までの回転技術(従来のモーター)は、どこが不十分で、【RT2】はどういう点が良いのか、
このホームページ上で、詳しく解説しております。
また、特許の明細書にも、回転の理論と方法(構成)を詳述しておりますので、
ホームページと特許明細書を よくお読み頂き、
この技術が産業上にもたらす影響力をご理解頂きたいと思います。
世界の年間の電気代は400兆円に向かおうとしています。
また、自動車の世界も、電気自動車化へと大革新が進んでおります。
しかしながら、蓄電池の寿命であったり、あるいは充電の待ち時間の問題など、
電気自動車のかかえる問題は小さくありません。
また、太陽光発電や風力発電など、自然のエネルギーを用いた発電技術がありますが、
天候や環境に左右され、例えば
天気の良い昼間しか発電できない、とか、
安定的に発電することができません。
また、蓄電コストは膨大で、昼間の電気を貯めておいて、全ての電力をまかなうことは困難です。
そのため、安全でクリーンな太陽光発電などに、一本化することができず、
火力発電や原子力発電をやめることができない現状があります。
しかし、火力発電はCO2の排出、地球温暖化の問題をかかえており、石油もいつかは枯渇します。
また、原子力は事故を起こすと、人間も含めた多くの生物の命を奪います。
今までは、それに代わる技術が無かったため、やむを得なかったと思います。
しかし、ここに回転技術【RT2】が現れました。
この技術は、「石油も原子力」も使わず、「安全」で、かつ「地球温暖化」を防ぐことができて、
しかも、「太陽光発電」などと違って、「安定的」に、電力をもたらすことができます。
電気自動車に搭載したり、家電製品に内蔵すれば、需要が飽和しているこの時代に、
もう一度、世界中で、新車の買い替え需要や、家電製品の買い替え需要が発生し、
各自動車メーカー様や、家電メーカー様の大幅な飛躍につながります。
日本に関して言えば、今まで石油などの資源を持たず、エネルギーとして輸出できるものが無かった中、
この技術【RT2】は、日本が発祥であり、世界に普及させることで、事実上の「エネルギー輸出」が
実現できます。
世界中の電力コストも下がり、そして、日本も豊かになります。
一緒に取り組んで頂ける企業様を求めております。
【世界的な科学雑誌に
一緒に論文を出しませんか?】
ネイチャーや、サイエンスなどの世界的な科学雑誌に
一緒に研究成果を発表しませんか?
【RT2】の回転の理論については、日本の特許を取得しました。
次のフェーズとして、「巡回型」を試作し、
その性能の実測値などを論文として発表したいと考えております。
一緒に、巡回型の試作や、性能評価、および連名での論文発表
に取り組んで頂ける企業様(もしくは研究者様)を募集します。
【資金協力のお願い】
【RT2】は、日本の特許を取得しております。
今後 世界の各国の特許を取得していくための資金、
および実用化のための試作の、資金のご協力をして頂ける
企業様を募集します。
【事業展開】
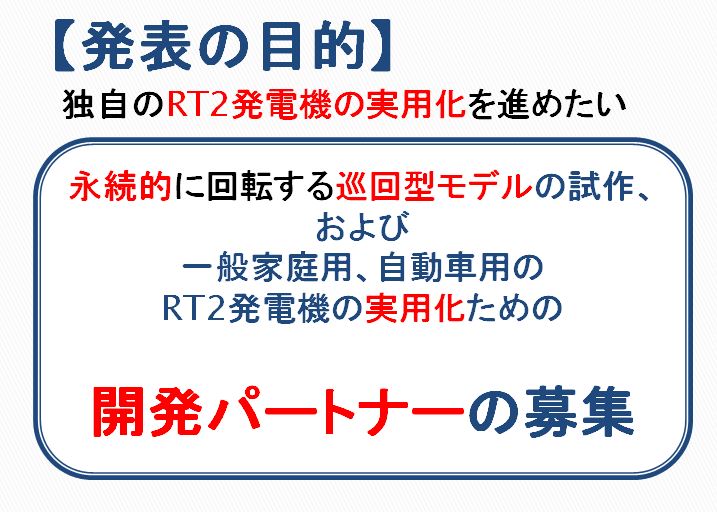
● 小型で燃料が要らない
「一般家庭用」および「自動車用」の「RT2発電機」の実用化を進め、
世界の年間の電気料金400兆円の6~7%(24兆円~28兆円)の
ライセンス収入の獲得を目指します。
【発表など】
● 2019年1月24日
福岡県立福岡中央高校にて 講演をさせて頂きました。
毎年お招き頂いていて、もう10年以上になります。毎年の楽しみ行事になっております。
研究開発の仕事に、「 何が必要 」なのかを お話しさせて頂きました。
講演を聞いて下さった皆さん、ありがとうございました。
くじけそうになったときに、ちょっと思い出してもらえたらと思います。
皆さんが幸せに、いい人生を歩んでくれることを願っています。

● 2018年12月19日
13:50~
第229回フクオカベンチャーマーケットで発表しました。
「一般家庭用」および「自動車用」のRT2発電機の実用化計画を発表しました。
https://www.fvm-support.com/monthlymarket/9859/


発表後の名刺交換など大盛況でした。たくさんのご来場ありがとうございました。
【共同開発企業様を募集】
いくつか課題があるものの、それらの課題を解決し、小型化と強力化を実現すれば、
小さくても一般家庭の全ての電力をまかなえる家庭用発電機や、それを複数個並べると、
自動車を動かせる発電機へと発展できると考えております。
また、全ての家電製品に内蔵すれば、コンセントすら要らない世界が実現できます。
世界的に、新車の買い替え需要や、家電製品の買い替え需要につながります。
まず、手始めにオモチャのようなものでいいので、
永続的に回転する「巡回型」を試作したいと思っております。
(この「巡回型」をオモチャ(知的玩具)として販売するのもいいと思います。)
次のステップとして、これを小型化して集積することで、
小さくても強く回転するRT2発電機を実用化したいと考えています。
一緒に開発に取り組んで頂ける企業様を募集しています。
是非ご連絡下さい。
磁石(磁力)には凄い力がある
エネルギーは「 力 x 移動 」で生まれます。
エネルギーを生むには、「 力 」が必要です。
世の中には、いろんな力があります。例えば「 重力 」です。
水力発電は、水の「重さ(重力)」を利用していますが、
重力の悪い点は、重力はどこにでも発生していて、
しかも向きが決まっていて、
力を与えたいところにだけ力を与えることができないことです。
上から下への水の流れを利用して水力発電をおこないますが、
重力はどこにでも発生しているため、重力によって下に行った水は、
重力のせいで、上に持ち上げることができません。
(発電に使った水をもう一度 上に上げるのを、太陽が水を蒸発させて、
やってくれています。)
だから、重力だけで発電することはできません。
しかし、磁石(磁力)だったらどうでしょうか?
磁石はとても永い間、磁力を発揮します。
しかも、重力と違って、磁力を与える場所を限定したり、
磁力を与える向きを自由に変えることができます。
また電池なら数日で電池切れになったりしますが、
磁石は短時間では力(磁力)を失いません。
だから、磁石(磁力)は、うまく使うと、永続的に凄いことができるのです。
じゃあなぜ、今までの回転技術(従来のモーター)は、
中で磁石が使われているのに、永続的に回転させることができないのでしょうか?
それは磁石(磁力)の使い方が間違っているからです。
以下では、今までの回転技術(従来のモーター)が、
どうして永続的に回転できないのか、
磁力をどのように使うと良いのか(RT2の回転の原理)、
を説明していきます。
なぜ今までできなかったのか
(■説明を作成中です■)
回転技術【RT2】の説明
【RT2】の構造
まず、【RT2】の構造について説明します。
様々なタイプがありますが、「スロープ型」について説明します。
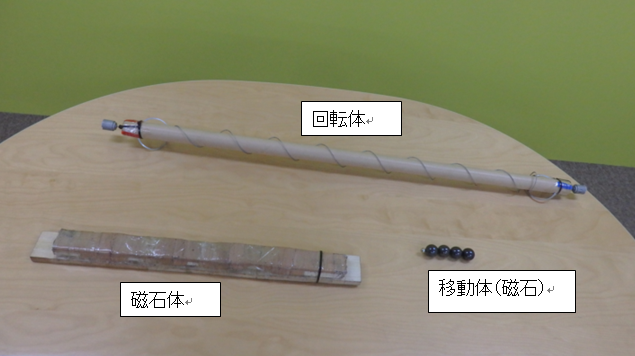
「回転体」と「磁石体」と「移動体(磁石)」で構成されます。


回転体には、スロープ状に金属が巻き付けてあり、その金属を「 レール 」と呼びます。
移動体は複数の球形の磁石を連結しています。

このようにレールに移動体(磁石)をつけて使います。
(実用化の際は、摩擦を減らすために、直接レールにつけるのではなく、
カーテンレールのような構造で、ベアリングを使って摩擦を減らして
耐久性を上げる必要があると思います。)
↓動作はこんなふうになります。(↓この動画を見て下さい。)
以下に、【RT2】ではどんな力が働いて回転しているのかについて説明していきます。
(■説明を作成中です■)
【RT2】はエントリーやリリースもうまくいく
↓ エントリーとリリースの様子です。
↑ 移動体(磁石)を、磁力のエリアに、画面右側からエントリーすれば、
磁石体の磁力に妨げられることなく、スムーズにエントリーできて、
エントリーすると自動的に回転がスタートし、スムーズにリリースできます。
(■説明を作成中です■)
【RT2】の実用化のステップ
巡回型モデルの試作
巡回型モデルの小型化/集積
↑ まず最初に【巡回型モデル】を試作し、
次のステップとして、小型化して集積化し、
小さくても強いパワーの一般家庭用のRT2モーターを
実現したいと思っています。
【巡回型モデル】は知的玩具として
【実用化モデル】は一般家庭用や自動車用

【巡回型モデル】を試作して、
まずは、オモチャ(知的玩具)として販売する方法も良いかと思います。
例えば、回転しながら電球が光り続けるとか。
これが、世界中で販売されれば、この技術に関して興味を持つ人が増え、
より良い改良型が生まれたり、実用化が加速する可能性があります。
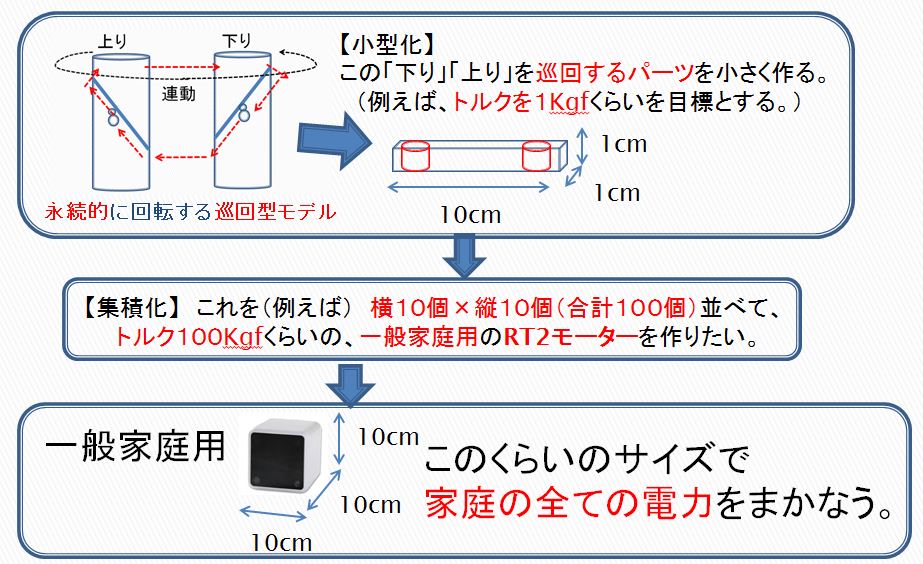
次に、この【巡回型モデル】を小型化して集積化します。
例えば、この巡回型を、高さ1cm、幅10cmくらいで実現し、
その部品が1Kgfくらいのトルクが出せたとします。
それを横10個x縦10個(合計100個)くらいに集積すれば、
100倍の100Kgfのトルクが出せます。
もし最初の部品が高さ1cmくらいの大きさにすることが難しく、
10cmくらいの高さとなったとして、
前面に持ってくる磁石体を強い磁石を使うなどで、
10Kgfくらいのトルクが出せれば、その部品を横に10個並べると、
10倍の100Kgfくらいのトルクが出せます。
今では磁石も1つで100Kgf以上の吸着力のある磁石もあるので、
構成によって強い力を発揮することができます。
目標として(例えば)10cm立方くらいの大きさで、
100Kgfくらいのトルクを出す【RT2モーター】を実現し、
それで家庭の全ての電力をまかない、
1個で足りなければ複数個使えば良いと思います。
世界的な自動車の買い替え需要に

この100Kfgくらいのトルクが出る部品を、10個使うと1トンの力が出るので、
電気自動車の内部での発電に使えると思います。
10個で足りなければ20個使うとか。
充電器の前で並ばなくて良い電気自動車が発売されれば、
世界的に新車の買い替え需要が起きると思います。
家電製品も世界的な買い替え需要に
大きな力を必要としない用途でも、
家電製品の一つ一つに小型の【RT2モーター(RT2発電機)】を
内蔵していくのもいいと思います。
各家電製品が世界中に行き渡って、これ以上需要を増やせない中、
各家電製品の世界的な買い替え需要につながります。
太陽光や風力発電があるのになぜ
新しい技術【RT2】が必要なのか
↑ 従来の発電技術には、様々な問題があります。
従来の火力発電は地球温暖化の問題をかかえ、
さらには、石油もいつかは枯渇します。
また、原子力発電は地震や津波などにより破損すると、
人間を含めたたくさんの生物の命を奪います。
では、太陽光発電や風力発電に移行すればいいという考えがありますが、
これらの発電は、天候(や環境)に左右されて、発電が安定しない、
という問題があります。
ならば、例えば昼間に発電した電気を貯めておけばいいじゃないか
という発想もありますが、実は電気を貯めておくのは
膨大なコストがかかります。
そのため、太陽光発電や風力発電に一本化できない、
という問題があります。
要するに火力発電や原子力発電をやめたくても やめられない状況があります。
しかし、火力発電は地球温暖化の原因となり、
原子力発電の危険性は言うまでもありません。
そこで、CO2も出さず、原子力のような危険性も無く、
太陽光や風力発電のような不安定さもない、
【RT2回転技術】による発電が必要となってくるのです。
以下ではさらに
技術的な詳しい解説をおこないます
【RT2】は制御もできる
例えば、システムのメンテナンスのために、
回転を止めたり、再始動したりする必要がありますが、
【RT2】は、簡単に回転の始動や停止を制御することができます。
↓ こちらの動画を見て下さい。
磁石体の向きを変えることで、回転を始動したり、停止することができます。
(■続きの説明を作成中です■)
会社概要
|
社 名
|
株式会社
ラムロック テクノロジー
RAMROCK TECHNOLOGY Co., LTD.
(旧社名: 有限会社ラムロック映像技術研究所 )
|
|
設 立
|
1999年1月
|
|
メール
|
rt2@ramrock-technology.jp
|
|
代表者
|
赤間俊和
|
|
所在地
|
福岡県福岡市早良区百道浜3-8-33 513-1
福岡システムLSI総合開発センター
|
|
事業内容
|
画像認識技術の研究開発
発電の要素技術の研究開発
開発した技術のライセンス事業
|
連絡先
メールにてご連絡下さい。
(株)ラムロック テクノロジー 代表取締役 赤間俊和
メール : rt2@ramrock-technology.jp
トピックス
●
ニュースリリース 2019年2月5日
「発電の未来を変える回転技術【RT2】」日本の【特許を取得】
●
2018年9月12日
「力の原理」を公開。同時に共同開発企業様を募集。
9月21日に「技術説明会」を開催予定。(費用は無料。事前申し込みが必要)
●
ニュースリリース 2018年7月10日
「 燃料を使わずに発電タービンを回転させる回転技術[RT2]
を開発 」